Databases and Repositories



Current Research Projects
My main research interests lie at the intersection of computer graphics, virtual reality, and vision. I specialize in character animation (analysis, classification, and synthesis) and motion capture, where I use techniques like machine learning and generative AI models to create virtual humans. My work also extends to digital heritage, VR/AR/MR environments, and the application of Conformal Geometric Algebra in computer graphics.

Human-centred generative Ai fraMework for culturaL industriEs’ digital Transition (HAMLET)
Funded by the Horizon Europe (HORIZON-CL2-2024-HERITAGE-01-03): Leverage the digital transition for competitive European cultural and creative industries.
Started: January 2025, Will be ending: December 2027.
Working as Project Manager and Principal Investigator: January 2025 - now
The «HAMLET» project aims to democratize access to Generative AI for Europe's Cultural and Creative Industries (CCIs), enabling entities of all sizes to benefit from AI for digital transition. It integrates a collaborative platform and AI tools to foster shared investments, collaboration, and innovation while promoting sustainable and inclusive frameworks for creative industries.

Empowering Skills for Butterfly Monitoring to Enable Resilience to Climate Change (EMBRACE)
Funded by Erasmus+, Small-scale partnerships in vocational education and training (Call 2024 Round 1 KA210-VET): Vocational Education and Training.
Started: December 2024, Will be ending: November 2025.
Working as Project Manager and Principal Investigator: December 2024 - now
The «EMBRACE» project aims to improve butterfly monitoring, contributing to EU environmental and biodiversity goals, particularly regarding climate change resilience. It engages farmers, agronomists, environmental scientists, and other stakeholders through education, including e-learning, a 3D digital butterfly museum, and replicable training materials. By involving a wide range of groups, from civil servants to citizens, the project fosters awareness and participation in biodiversity conservation efforts across Europe.
Completed Research Projects

Performing arts in a new era: AI and XR tools for better understanding, preservation, enjoyment and accessibility (PREMIERE)
Funded by the Horizon Europe (HORIZON-CL2-2021-HERITAGE-01-04): Preserving and enhancing cultural heritage with advanced digital technologies.
Started: October 2022, Ended: September 2025.
Worked as Principal Investigator: October 2022 - September 2025
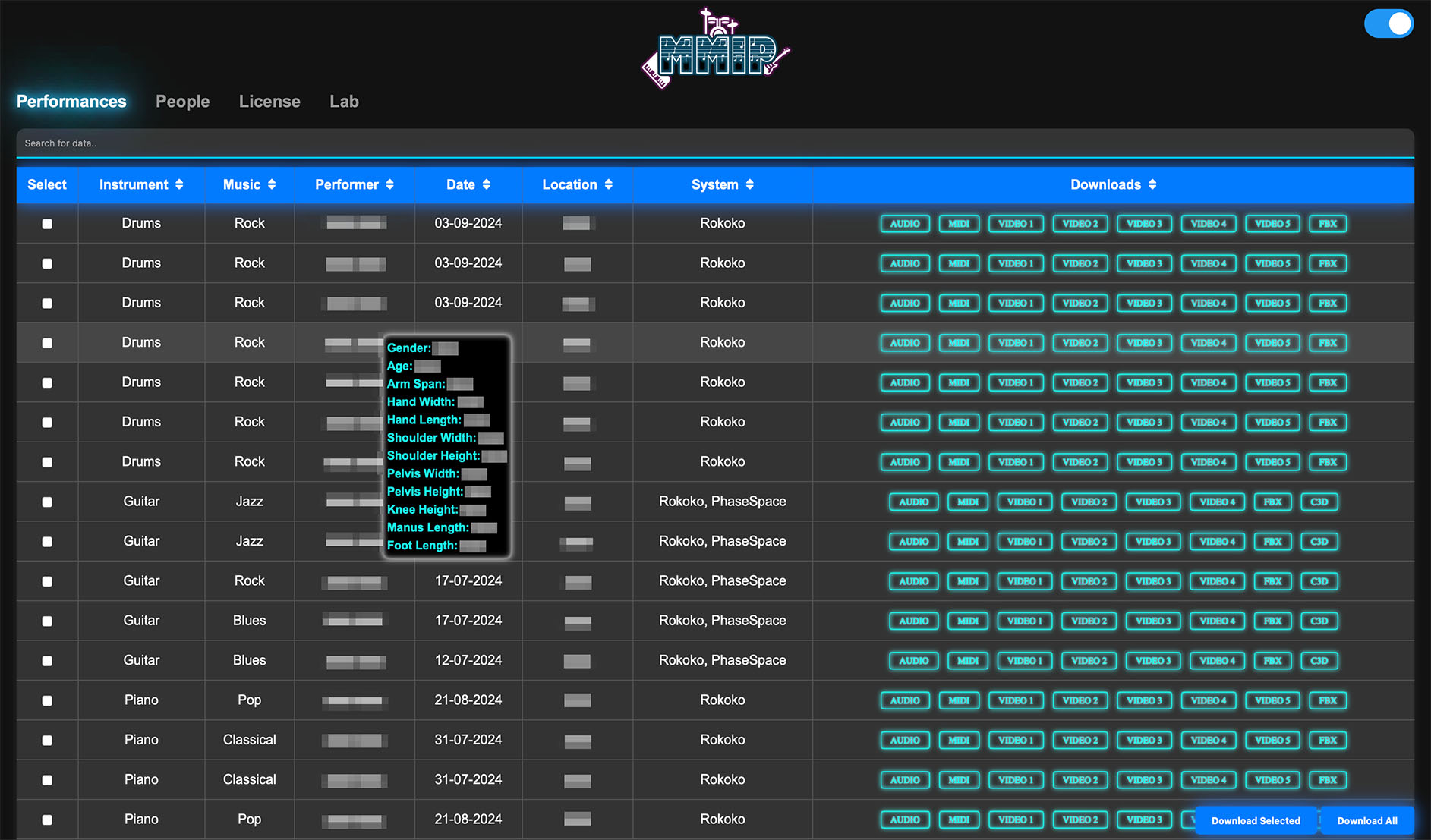
The project «PREMIERE» (Performing arts in a new era: AI and XR tools for better understanding, preservation, enjoyment and accessibility) seeks to modernize the performing arts focusing on dance and theater by using advanced digital technologies to support the whole lifecycle of performances. The overall objective of PREMIERE is to develop and validate a comprehensive ecosystem of digital applications, powered by leading edge AI, XR and 3D technologies, designed to fulfill the needs of diverse end-user communities involved in the main stages of the lifecycle of performing arts productions.

Creating Lively Interactive Populated Environments (CLIPE)
Funded by: European Union’s Horizon 2020 (H2020-MSCA-ITN-2019) research and innovation programme under the Marie Skłodowska-Curie grant agreement No 860768.
Started: May 2020, Ended: April 2024.
Worked as Principal Investigator: May 2020 - April 2024
The primary objective of CLIPE is to train a generation of innovators and researchers in the field of virtual characters simulation and animation. Advances in technology are pushing towards making VR/AR worlds a daily experience. Whilst virtual characters are an important component of these worlds, bringing them to life and giving them interaction and communication abilities requires highly specialized programming combined with artistic skills, and considerable investments: millions spent on countless coders and designers to develop video-games is a typical example. The research objective of CLIPE is to design the next-generation of VR-ready characters.

DEep MOtioN SynThesis foR character AnimaTION (DEMONSTRATION)
Funded by the Research and Innovation center, University of Cyprus.
Started: September 2021, Ended: December 2023.
Worked as Project Coordinator: September 2021 - December 2023
The project «DEMONSTRATION: DEep MOtioN SynThesis foR character AnimaTION» covers a wide range of multidisciplinary topics that are in line with the recent tendencies in computer graphics, character animation, and virtual reality. It aims at investigating modern trends in machine (deep, convolutional, adversarial, and reinforcement) learning, with ultimate target to provide ingenious solutions for overcoming the current limitations in character animation, and essentials for future improvements in a wide range of ambitious and challenging projects.

Advancing the motion capture technoLogy viA DistributeD wIreless Networks (ALADDIN)
Funded by Cyprus Seeds.
Started: December 2020, Ended: May 2022.
Worked as Principal Investigator: December 2020 - May 2022
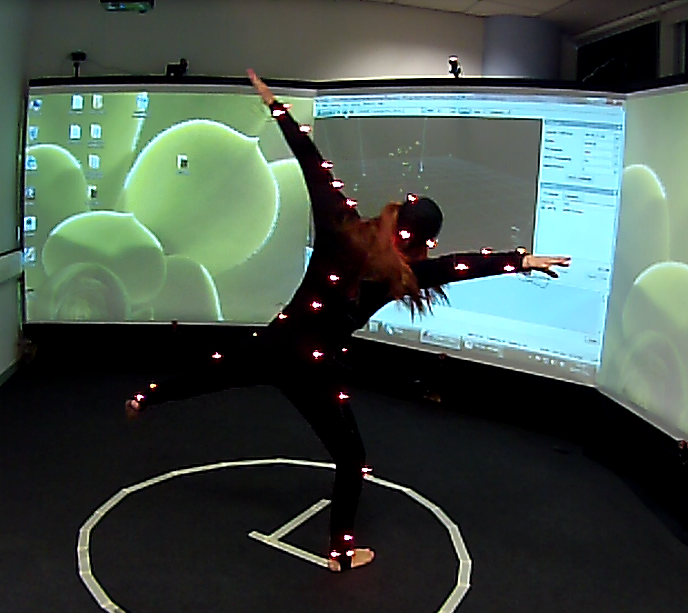
Motion capture is a technology used for turning the observations of a moving subject into 3D position and orientation information, stimulating our ability to define and virtually portray complex movements. The ALADDIN project aims at the development of such a technology that goes beyond conventional methods, is cost-effective, and minimizes the risks associated with capturing in dynamic situations. The proposed system is easily scalable and intrinsic, in the sense that measurements are not taken by external devices, enabling efficient capturing in outdoor environments, with state-of-the-art acquisition accuracy. More information can be found at the Cyprus Seeds - ALADDIN project.
Safeguarding the Cultural HEritage of Dance through Augmented Reality (SCHEDAR)
Funded by the Cyprus Research Promotion Foundation through JPI on Cultural Heritage
Started: June 2018, Ended: November 2021.
Worked as senior post-doc researcher: June 2018 - August 2019
Worked as project manager: June 2018 - November 2021
SCHEDAR aims to contribute in the safeguarding of our Intangible Cultural Heritage (ICH), and more specifically folk dancing, by providing novel solutions to the three key challenges of archiving, reusing & repurposing, and ultimately disseminating ICH creations. A comprehensive set of new guidelines will be devised, and a framework and software tools for leveraging existing ICH motion databases. Data acquisition will be undertaken holistically; encompassing data related to the performance, the performer, the kind of the dance, the hidden/untold story, etc. Innovative use of state-of-the-art multisensory Augmented Reality technology will be used to enable direct interaction with the dance, providing new experiences and training in traditional dance.

Advancing site level management through innovative reptiles' tracking and behavioural decryption (ReTrack)
Funded by the European Regional Development Fund and the Republic of Cyprus through the Research Promotion Foundation
Started: December 2018, Ended: May 2021.
Worked as associate researcher: December 2018 - May 2021
ReTrack aims to tackle the problem of animal monitoring and habitat utilization, specifically designed for small-sized reptiles. It will advance the scientific knowledge in the fields of (a) reptile locomotion, (b) behavioral analysis, and (c) conservation, through the development of innovative monitoring techniques and approaches. Utilizing state-of-the-art technology in remote sensing, advanced photogrammetry and image pattern recognition, ReTrack aims to create fine-scale micro-habitat utilization maps for two common Cypriot species, a lizard (Stellagama stellio) and a snake (Dolichophis jugularis), thus advancing site level management through the designing of more targeted, species based management and conservation actions.
 Visit our 3D reptiles museum .
Visit our 3D reptiles museum .
More details about my involvement in the project can be found at the behavioral analysis section of the project.
Initial Training Network for Digital Cultural Heritage (ITN-DCH)
Funded by the European Union under the FP7 PEOPLE research framework
Started: October 2013, Ended: September 2017.
Worked as project deputy manager: January 2015 - October 2015
ITN-DCH aims -for the first time worldwide- to analyze, design, research, develop and validate an innovative multi-disciplinary and inter-sectorial research training framework that covers the entire lifecycle of digital CH research for a cost–effective preservation, documentation, protection and presentation of cultural heritage. CH is an integral element of Europe and vital for the creation of a common European identity and one of the greatest assets for steering Europe’s social, economic development and job creation. However, the current research training activities in CH are fragmented and mostly design to be of a single-discipline, failing to cover the whole lifecycle of Digital Cultural Heritage (DCH) research, which is by nature a multi-disciplinary and inter-sectorial research agenda.
Visual Dance Performance for Interactive Characters (ViDaPe)
Co-financed by the European Regional Development Fund and the Republic of Cyprus through the Research Promotion Foundation
Started: June 2012, Ended: January 2015.
Worked as Principal Investigator
This project aims at generating a virtual animated character that interacts, in real-time, with a real dancing performer to compose a contemporary dancing show. The proposed research will explore innovative topics with special interest in the area of computer animation, including methods which smoothly combine optical motion capture (mocap) data with kinematic techniques, human figure modelling, a novel methodology for motion classification and partial-body motion synthesis. The system will be adjusted dynamically according to the performers' actions and responses, offering the maximum possible interaction between the natural and virtual performer. Similar techniques can be adapted to the game industry, possibly for military or local law enforcement training simulators or other virtual character animations.

Dance Digitization
Partially funded by the Cyprus Research Promotion Foundation
Started: June 2012
Worked as Principal Investigator
This project aims at creating a publicly accessible digital archive of dances using 3D motion capture data (with metadata); more emphasis will be given to Cypriot and Greek folk dancing.
This is an evolving project and data will be added to our database as we capture them over time.
Cyprus has a long and rich history of dance tradition which unfortunately, year after year, tends to be forgotten; thus, it is our duty to help documenting and disseminating our dance heritage to the younger generations. In this work, we aim to preserve the Cypriot folk dance heritage, creating a state-of-the-art publicly accessible digital archive of folk dances. Our dance library, apart from the rare video materials that are commonly used to document dance performances, utilises three dimensional motion capture technologies to record and archive high quality motion data of expert dancers. Apart from the goal of preserving this intangible cultural heritage by digitizing it, the project is interested in increasing the awareness of the local community to its dance heritage. To achieve this a 3D video game for children is developed to teach these folk dances to the younger generations.

Virtual Reality Police Simulator (SIM.POL.VR)
Funded by the Cyprus Research Promotion Foundation
Started: December 2009, Ended: November 2011.
Worked as Researcher: March 2011 - June 2011
SimPol VR (Synthesis of Dynamic Characters with motion capture data for human figure animation: Educating the police force) is a research project funded by the Cyprus Research Promotion Foundation in the area of Computer Graphics and more specifically in the sub-area of Human Body Animation. The project focuses in investigating the usability and applicability of Virtual Reality in training special forces. It proposes the development of a platform using Computer Graphics techniques (as oppossed to the existing video-based system that is restrictive), for the creation of a 3D Visualisation Tool enriched with tools suitable for the formation and customisation of dynamic scenarios. The proposed platform will be used as a simulator for training purposes by the Cyprus Police Emergency Response Unit. The user of the platform will be able to fully participate, act and interact with the environment. To achieve the above, research will be carried out in the area of Computer Animation for realistic avatar movement as well as the realistic and dynamic change of facial expressions. Smoothing of the surfaces on the avatar models used is another area that will be targeted by this project work. Researchers from Frederick University, the University of Cyprus, P.A. College, the University of Nicosia and abroad will be involved as well as acting trainers from the Cyprus Police Emergency Response Unit.
Forward And Backward Reaching Inverse Kinematics
Funded by the Cambridge European Trust
Started: April 2007, Ended: April 2010
Worked as Principal Investigator
Inverse Kinematics is defined as the problem of determining a set of appropriate joint configurations for which the end effectors move to desired positions as smoothly, rapidly, and as accurately as possible. However, many of the currently available methods suffer from high computational cost and production of unrealistic poses. In this work, a novel heuristic method, called Forward And Backward Reaching Inverse Kinematics (FABRIK), is described and compared with some of the most popular existing methods regarding reliability, computational cost and conversion criteria. FABRIK avoids the use of rotational angles or matrices, and instead finds each joint position via locating a point on a line. Thus, it converges in fewer iterations, has low computational cost and produces visually realistic poses. Constraints can easily be incorporated within FABRIK and multiple chains with multiple end effectors are also easily supported.
© 2025 Andreas Aristidou